Detect Anything via Next Point Prediction
객체 검출은 오랫동안 YOLO, DETR, Grounding DINO와 같은 회귀 기반 모델이 주도해왔습니다. 최근 MLLM(Multimodal Large Language Model)을 활용한 시도들이 있었지만, 낮은 재현율, 중복 예측, 좌표 불일치 등의 문제에 직면했습니다. 이 논문은 이러한 격차를 해소하기 위해 Rex-Omni라는 3B 파라미터 MLLM을 제안합니다. Rex-Omni는 COCO와 LVIS 벤치마크에서 제로샷 설정으로 DINO, Grounding DINO와 같은 회귀 기반 모델과 비슷하거나 더 나은 성능을 달성합니다.
Q. Jiang, J. Huo, X. Chen, Y. Xiong, Z. Zeng, Y. Chen, T. Ren, J. Yu, and L. Zhang, "Detect Anything via Next Point Prediction", arXiv preprint arXiv:2510.12798, 2025.
요약
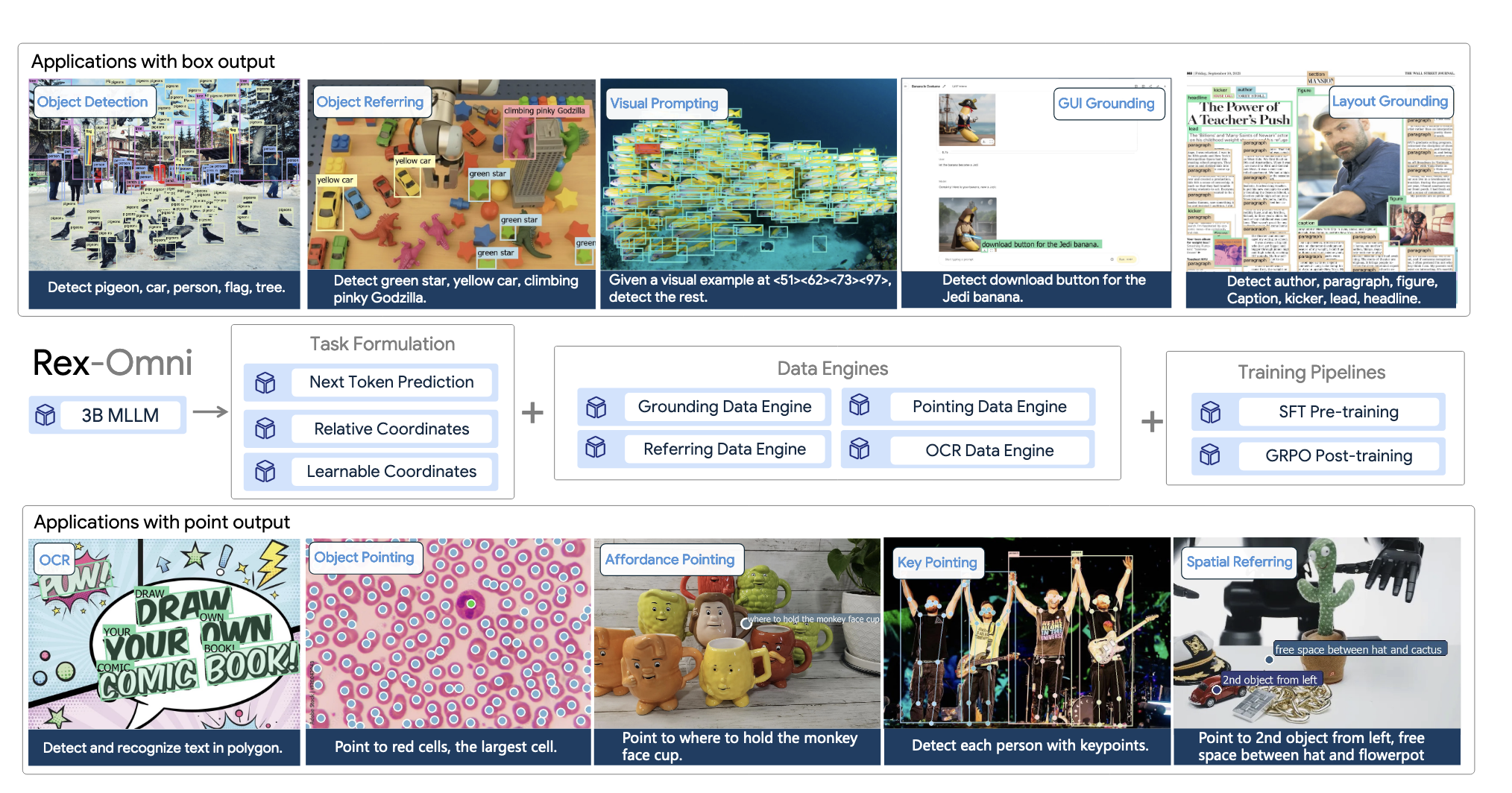
아키텍처: Rex-Omni는 Qwen2.5-VL-3B를 기반으로 구축되었으며, 0부터 999까지의 양자화된 좌표를 나타내는 특수 토큰을 사용합니다. 마지막 1,000개의 어휘 토큰을 재사용하여 좌표를 표현합니다.
태스크 정의: 모든 시각 인식 태스크를 좌표 예측으로 통합합니다. 포인팅은 한 점, 검출은 두 점으로 바운딩 박스, 폴리곤은 네 개 이상의 점, 키포인트는 여러 의미적 점을 출력합니다.
데이터 엔진: 세 가지 전문 데이터 엔진을 구축했습니다.
- Grounding Data Engine: DINO-X로 약 300만 개의 이미지에 grounding 레이블 생성
- Referring Data Engine: Qwen2.5-VL-7B와 Molmo를 사용하여 약 300만 개의 referring 데이터 생성
- 기타 엔진: Pointing(500만), OCR(200만) 데이터 생성
공개 데이터셋 890만 개와 합쳐 총 2,200만 개의 고품질 학습 데이터를 확보했습니다.
학습 방법: 2단계 학습 파이프라인을 채택합니다.
- 1단계 (SFT): 2,200만 개 데이터로 지도 학습 미세조정
- 2단계 (GRPO): 기하학적 인식 리워드를 사용한 강화학습 후처리
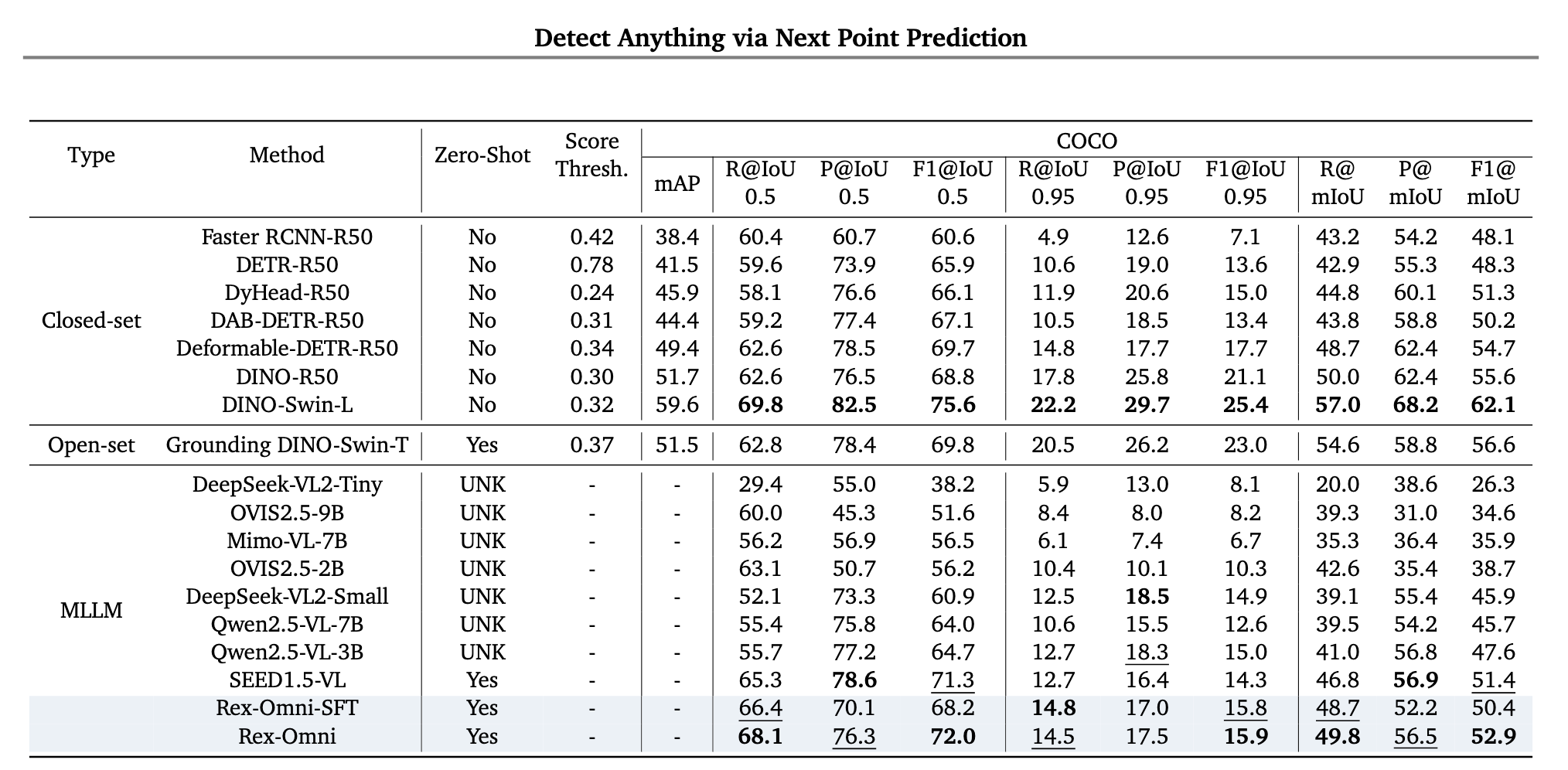
평가 메트릭: 전통적인 mAP 대신 Recall, Precision, F1 스코어를 사용합니다. IoU 임계값 0.5, 0.95, 평균(0.5~0.95)에서 평가합니다.
주요 결과:
- COCO: F1@IoU 0.5에서 72.0%, DINO-R50(60.6%)과 Grounding DINO(69.8%)를 능가
- LVIS: F1@IoU 0.5에서 64.3%, Grounding DINO(47.7%)를 크게 초과
- Dense200: F1@IoU 0.5에서 78.4%, 기존 MLLM들이 대부분 실패한 밀집 객체 검출에서 우수한 성능
- Referring: HumanRef에서 F1@mIoU 79.9%, SEED1.5-VL(81.6%)에 근접
- GUI Grounding: ScreenSpot V2에서 86.8%, 3B 모델 중 최고
논문 상세
Introduction
객체 검출은 초기 CNN 기반 구조(YOLO, Faster R-CNN)에서 트랜스포머 기반 모델(DETR, DINO)로 발전했으며, 폐쇄형 검출에서 개방형 검출로 진화했습니다.
목표: 임의의 객체와 개념을 식별할 수 있는 모델 개발
기존 접근법의 한계:
-
개방 어휘 검출 모델(Grounding DINO 등)
- BERT나 CLIP 같은 텍스트 인코더 사용
- 얕은 언어 이해로 복잡한 의미 설명 처리 어려움
- 예: "빨간 사과" 입력에도 모든 사과 검출
-
기존 MLLM 기반 접근법
- 좌표를 이산 토큰으로 표현하고 다음 토큰 예측으로 바운딩 박스 생성
- 정확한 객체 위치 파악 어려움
- 낮은 재현율, 좌표 드리프트, 중복 예측 문제
성능 격차의 두 가지 근본 원인:
1. 이산-연속 매핑의 어려움
MLLMs는 좌표 예측을 이산 분류 작업으로 다룹니다. 절대 좌표 값을 직접 생성하고 크로스엔트로피 손실을 사용합니다.
문제점:
- 회귀 기반 모델은 연속적이고 기하학적으로 인식하는 손실(L1, GIoU) 사용
- 작은 픽셀 오정렬도 불균형하게 큰 크로스엔트로피 손실 발생
-
예: GT가 (32, 66)이고 예측이 (34, 69)인 경우
- 회귀 손실: L1(34, 32) + L1(69, 66) = 낮은 값
- 분류 손실: CE(34, 32) + CE(69, 66) = 높은 값
2. Teacher Forcing의 한계
SFT(Supervised Fine-tuning)는 teacher forcing 방식을 사용합니다.
문제점:
- 학습 중에는 항상 정답 접두사를 조건으로 함
- 모델 자체의 불완전한 예측에 노출되지 않음
- 학습과 추론의 불일치
- 자율적 생성 시 구조 조절 실패
- 결과: 중복 예측이나 객체 누락 발생
Rex-Omni의 핵심 설계
1. 태스크 정의
좌표 표현 방식 선택:
세 가지 패러다임 비교:
- 직접 좌표 예측 (채택): 좌표를 LLM 어휘의 이산 토큰으로 처리
- 검색 기반: 추가 제안 모듈 사용, LLM이 후보 영역의 인덱스 예측
- 외부 디코더: LLM이 특수 토큰 예측, 임베딩을 외부 디코더에 전달
좌표 형식 선택:
세 가지 변형 비교:
- 특수 토큰을 사용한 상대 좌표 (채택): 0~999로 양자화, 각 좌표를 특수 토큰으로 표현
- 특수 토큰 없는 상대 좌표: 1,000개 구간으로 양자화하지만 여러 원자 토큰 사용
- 절대 좌표: 1921을 (1, 9, 2, 1)로 토큰화
채택 이유:
- 상대 좌표: 1,000개 범주로 제한하여 학습 복잡도 감소
- 특수 토큰: 토큰 효율성 향상 (박스당 4토큰 vs 15토큰)
입력 형식:
텍스트 프롬프트 예시:
Please detect pigeon, person, truck, snow in this image.
Return the output in box format.
비주얼 프롬프트 예시:
Here are some example boxes specifying the location of several objects
in the image: "object1": ["<12><412><339><568>", "<92><55><179><378>"].
Please detect all objects with the same category and return their
bounding boxes in [x0, y0, x1, y1] format.
출력 형식:
기본 구조:
<|object_ref_start|>PHRASE<|object_ref_end|><|box_start|>COORDS<|box_end|>
바운딩 박스:
<|object_ref_start|>person<|object_ref_end|><|box_start|>
<12><42><512><612>, <24><66><172><623>, ...<|box_end|>
포인트:
<|object_ref_start|>button<|object_ref_end|><|box_start|>
<100><150>,<200><250>, ...<|box_end|>
키포인트:
{"person1": {"box": <0><123><42><256>,
"keypoints": {"left eye": <32><43>, "right eye": <66><55>, ...}}}
모델 아키텍처:
Qwen2.5-VL-3B-Instruct 기반으로 최소한의 수정:
- 어휘의 마지막 1,000개 토큰을 0~999 좌표를 나타내는 특수 토큰으로 재사용
- 추가 파라미터 없음
- 네이티브 해상도 ViT 사용
2. 학습 데이터
공개 데이터셋: 약 890만 샘플
- Object Detection: APTv2, BDD100K, O365, COCO 등
- Referring: RefCOCOg, HumanRef
- OCR: HierText, ICDAR2013/2015, TextOCR 등
- GUI Grounding: Os-Atlas, UI-Ref Exp, ShowUI
- Keypointing: COCO-Keypoint, MPII, CrowdPose 등
Grounding Data Engine: 약 300만 이미지
- 이미지 캡셔닝: Qwen2.5-VL-7B로 설명 생성
- 구문 추출: SpaCy로 명사구 추출
-
구문 필터링: 형용사 등 속성 포함 구문 제거 (예: "green lemon" 제거, "lemon" 유지)
- 이유: 현재 grounding 모델들이 속성 이해 부족
- 구문 grounding: DINO-X로 바운딩 박스 생성
Referring Data Engine: 약 300만 이미지
- 표현 생성: Qwen2.5-VL-7B로 referring expression 생성
- 포인팅: Molmo로 각 표현의 공간 포인트 생성
- 마스크 생성: SAM으로 각 GT 박스의 마스크 생성
- 포인트-박스 연결: Molmo의 포인트가 마스크 내에 있으면 박스와 referring expression 연결
기타 데이터 엔진:
- Pointing: 약 500만 샘플. SAM으로 마스크 생성, 회전 사각형의 대각선 교점을 포인트로 사용
- OCR: 약 200만 샘플. PaddleOCR로 텍스트 영역과 전사 추출
총 데이터: 2,200만 고품질 주석 이미지
3. 학습 파이프라인
1단계: Supervised Fine-tuning (SFT)
온라인 대화 데이터 구성 전략:
- 다양한 질문 템플릿 사용
- 이미지당 1~N개의 구문 무작위 샘플링
- 비주얼 프롬프팅 훈련 포함
학습 설정:
- 8노드 × 8 A100 GPU
- 약 8일 학습
- 모든 파라미터 업데이트
- 학습률: Vision Encoder 2e-6, Projection & LLM 2e-5
- AdamW 옵티마이저
- 입력 픽셀: 16×28×28 ~ 2560×28×28
2단계: GRPO 기반 강화학습 후처리
SFT의 한계:
-
기하학적 이산화 문제
- 좌표를 범주 토큰(<0>~<999>)으로 표현
- GT가 <33>이고 예측이 <32>면 픽셀 차이는 무시할 수 있지만 CE 손실은 완전히 틀린 것으로 처리
- GT가 <0><0><100><100>이고 예측이 <0><0><100><1000>이면 하나의 토큰만 틀렸지만 박스는 심각하게 잘못됨
-
행동 조절 결핍
- Teacher forcing으로 박스 수가 GT와 동일하게 고정
- 모델이 자율적으로 객체 수 학습 못함
- 추론 시: (1) 예측 박스 부족 또는 (2) 과도한 예측 (동일/약간 이동한 좌표 반복)
GRPO 작동 방식:
이미지와 질문 \((I, x)\)가 주어지면:
- 현재 정책 \(\pi_\theta\)에서 \(G\)개의 완전한 응답 샘플링
- 각 출력 \(o_i\)에 대해 스칼라 리워드 \(r_i\) 계산
- 그룹 전체에서 정규화하여 상대적 이점 계산:
\[A_i = \frac{r_i - \text{mean}(r_1, \ldots, r_G)}{\text{std}(r_1, \ldots, r_G)}\]
- GRPO 목적 함수:
\[\mathcal{J}_{\text{GRPO}}(\theta) = \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} [\min(\rho_{i,t} \hat{A}_{i,t}, \text{clip}(\rho_{i,t}, 1-\epsilon, 1+\epsilon) \hat{A}_{i,t}) - \beta D_{KL}[\pi_\theta | \pi_{\text{ref}}]\]
기하학적 인식 리워드:
-
Box IoU Reward (검출, grounding, referring, OCR)
- GT 박스와 예측 박스 매칭
- 카테고리 일치하면 IoU를 리워드로, 아니면 0
- Recall, Precision, F1 계산:
\[\text{Recall} = \frac{\sum_{j=1}^{n} r_j}{n}, \quad \text{Precision} = \frac{\sum_{j=1}^{n} r_j}{m}, \quad r_{\text{IoU}} = \frac{2 \cdot \text{Precision} \cdot \text{Recall}}{\text{Precision} + \text{Recall} + \epsilon}\]
-
Point-in-Mask Reward (포인팅 태스크)
- SAM으로 GT 박스의 마스크 추출
- 예측 포인트가 마스크 내부이고 카테고리 일치하면 1, 아니면 0
-
Point-in-Box Reward (GUI Grounding)
- 예측 포인트가 GT 박스 내부면 1, 아니면 0
학습 설정:
- SFT 데이터셋에서 66K 샘플 사용
- 8 A100 GPU, 약 24시간
- Rollout 크기: 8
- KL 페널티 \(\beta\): 0.01
- 배치 크기: 64
벤치마크 결과
Common Object Detection (COCO)
평가 설정:
- 5,000개 테스트 이미지, 80개 카테고리
- Rex-Omni-SFT: SFT만 거친 모델
- Rex-Omni: SFT + GRPO 모델
- Temperature 0으로 평가
주요 결과:
- F1@IoU 0.5: Rex-Omni 72.0% > DINO-R50 60.6%, Grounding DINO 69.8%
- F1@IoU 0.95: Rex-Omni 15.9%, DAB-DETR 13.4%를 약간 상회
- F1@mIoU: Rex-Omni 52.9% > Grounding DINO 48.1%
의미:
- MLLM 기반 검출이 제로샷으로 회귀 기반 모델 능가 가능
- IoU 0.95에서는 회귀 모델에 약간 뒤처짐 (정밀한 박스 위치에서는 한계)
-
GRPO 후처리로 큰 성능 향상 (SFT 68.2% → GRPO 72.0%)
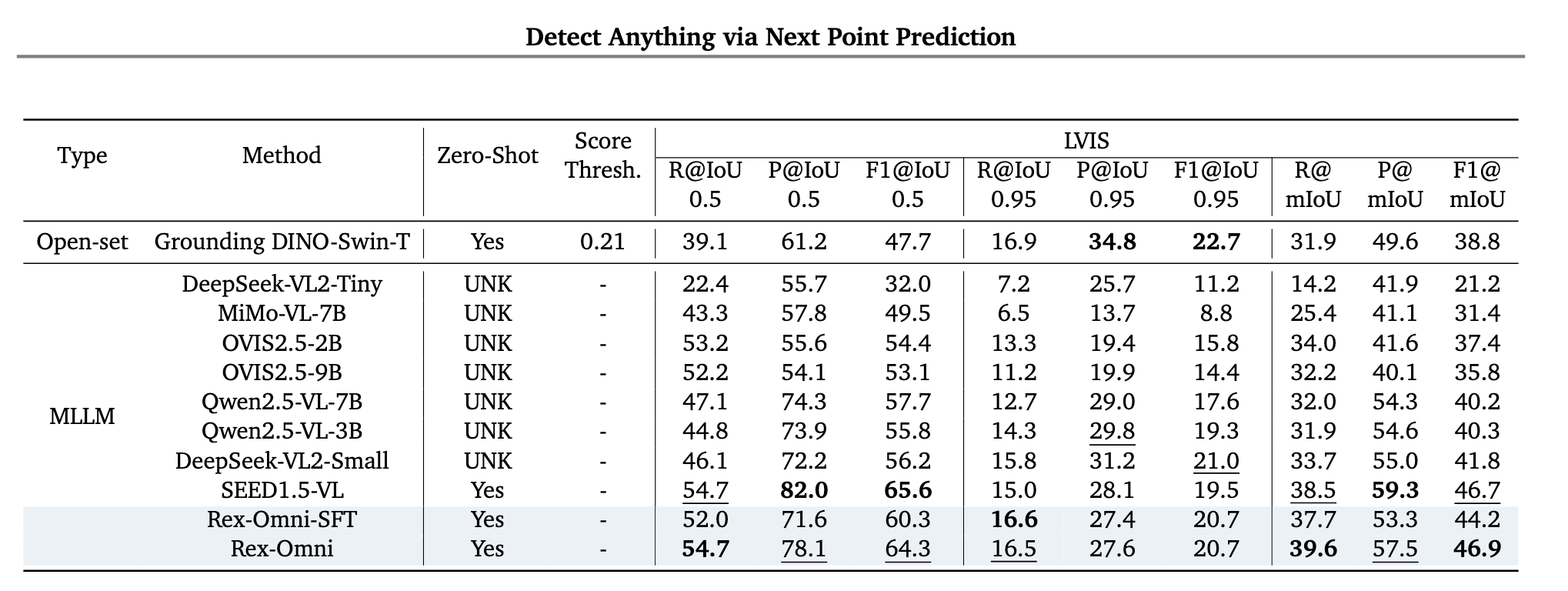
Long-tailed Object Detection (LVIS)
벤치마크: 1,203개 카테고리, 19,626개 테스트 이미지
주요 결과:
- F1@IoU 0.5: Rex-Omni 64.3% > Grounding DINO 47.7%
- F1@mIoU: Rex-Omni 46.9% > Grounding DINO 31.9%
의미:
- MLLM의 강력한 언어 이해가 저빈도 카테고리에서 우수한 일반화
-
mIoU에서 최고 성능 달성 (정밀한 박스 위치)
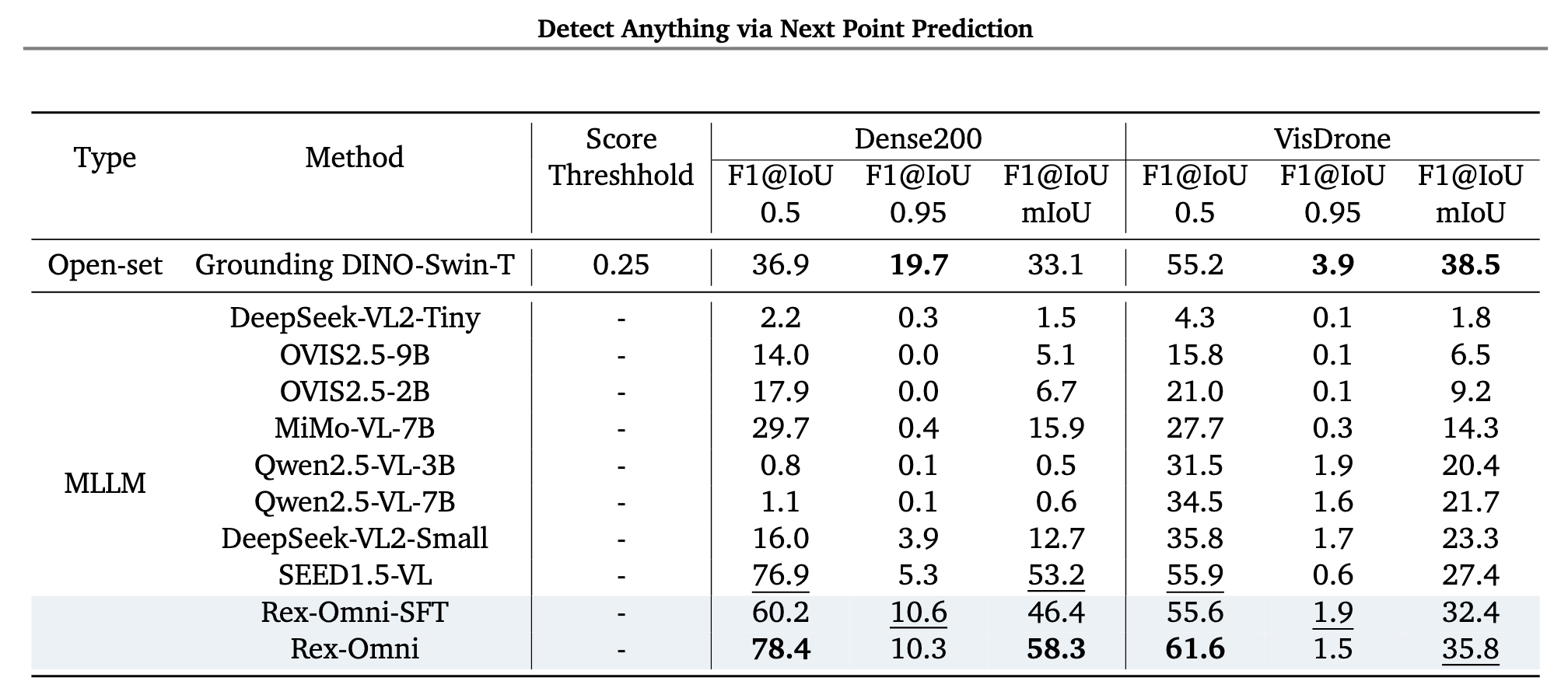
Dense and Tiny Object Detection
벤치마크:
- VisDrone: 1,610개 항공 교통 이미지, 평균 박스 크기 30.7×32.4
- Dense200: 200개 이미지, 평균 91.2개 박스/이미지, 평균 크기 66.8×64.5
주요 결과:
- Dense200: Rex-Omni F1@0.5 78.4% >> 대부분 MLLM < 30%
- VisDrone: Rex-Omni F1@0.5 61.6% >> 대부분 MLLM < 40%
실패 모드 분석:
- Large-box prediction: 여러 인접 객체를 하나의 큰 박스로 커버
- Structured duplicate predictions: 최소 오프셋으로 좌표 반복
GRPO의 효과:
- SFT-only 모델은 이러한 문제 심각
-
GRPO 후처리로 중복 예측 거의 사라짐
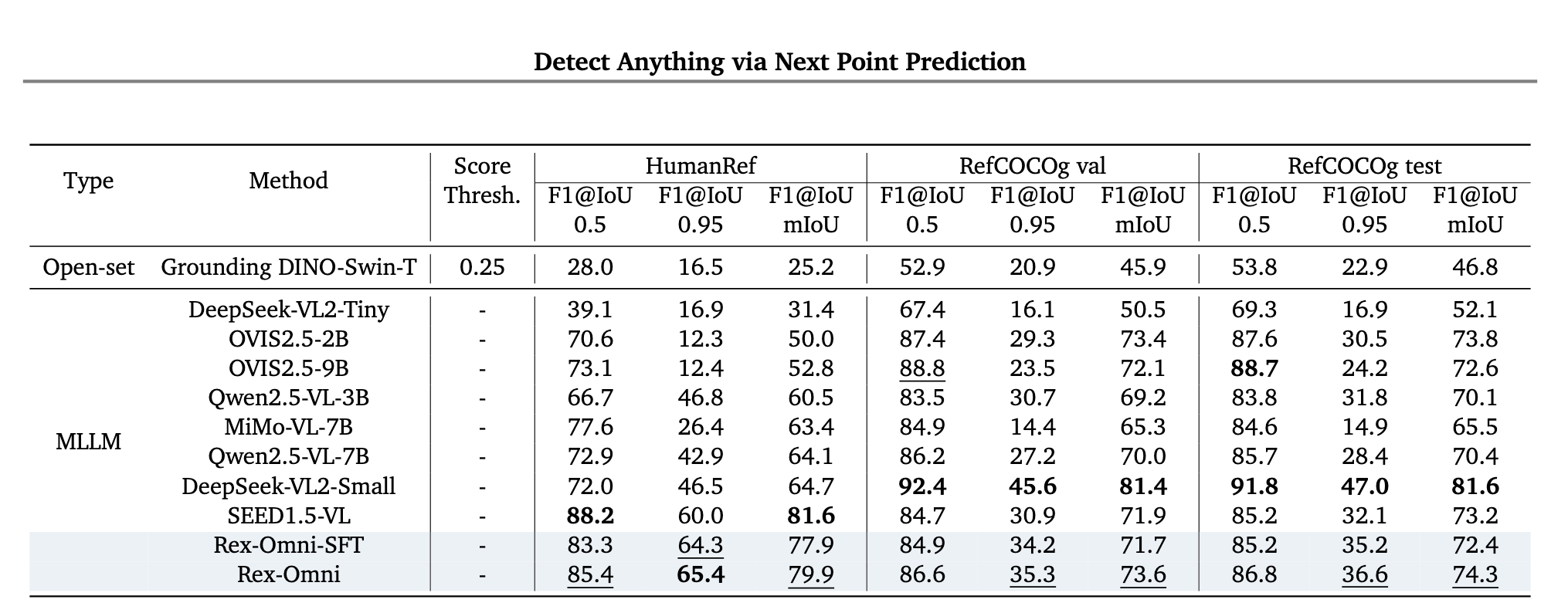
Referring Object Detection
벤치마크:
- RefCOCOg: 4,889 val, 9,577 test expressions
- HumanRef: 5,000개 이미지, 6개 서브셋 (속성, 위치, 상호작용, 추론, 유명인)
주요 결과:
- HumanRef: Rex-Omni F1@mIoU 79.9%, SEED1.5-VL 81.6%에 근접
- RefCOCOg val: Rex-Omni F1@0.5 86.6% > Grounding DINO 52.9%
- RefCOCOg test: Rex-Omni F1@0.5 86.8% > Grounding DINO 53.8%
Visual Prompting
평가:
- FSC147: 1,190개 이미지, 객체 카운팅 데이터셋
- COCO, LVIS, Dense200: 각 카테고리당 하나의 박스를 비주얼 프롬프트로 샘플링
주요 결과:
- 전통 전문가 모델 T-Rex2에는 미치지 못하지만 강력한 성능
- 특히 밀집 장면과 롱테일 시나리오에서 우수
Object Pointing
평가: COCO, LVIS, Dense200, VisDrone, RefCOCOg, HumanRef에서 포인트 예측
주요 결과:
- COCO: Rex-Omni 80.5% > Molmo-7B 77.3%, SEED1.5-VL 78.2%
- LVIS: Rex-Omni 70.8%, SEED1.5-VL 70.7%
- Dense200: Rex-Omni 82.5% >> SEED1.5-VL 72.1%
- HumanRef: Rex-Omni 83.8% > SEED1.5-VL 83.1%
모든 벤치마크에서 최고 F1 스코어 달성
GUI Grounding
벤치마크:
- ScreenSpot-V2: 모바일, 데스크톱, 웹 시나리오, 1,272개 이미지
- ScreenSpot-Pro: 초고해상도 인터페이스, 1,581개 이미지
주요 결과:
- ScreenSpot-V2 평균: Rex-Omni 86.8%, 3B 모델 중 최고
- ScreenSpot-Pro 평균: Rex-Omni 55.9%, 3B 모델 중 최고
기타 태스크
Layout Grounding (DocLayNet, M6Doc):
- Rex-Omni가 다른 MLLM 크게 능가
- Closed-set 모델과는 격차 있지만 개방형 일반화 능력으로 장점
OCR (HierText, ICDAR2015, TotalText, SROIE):
- BBOX 형식: PaddleOCRv5와 비슷하거나 우수
- POLY 형식: ICDAR2015에서 최고 성능
Spatial Pointing (RefSpatial-Bench):
- Location: Rex-Omni 54.0% > Molmo-72B 45.8%
- Placement: Rex-Omni 50.0% > Molmo-72B 14.7%
- Unseen: Rex-Omni 36.4% > Molmo-72B 21.2%
Keypoint (COCO, AP10K):
- AP10K에서 Rex-Omni 30.1% >> X-Pose 17.0%
- 크로스 도메인 일반화 우수
심층 분석
GRPO가 작동하는 이유
1. 학습 역학
SFT 단계: 꾸준하고 점진적인 개선 GRPO 단계: 적은 단계로 급격한 성능 향상
해석: SFT 모델은 이미 강력한 잠재 능력을 보유하지만 충분히 활용되지 않음. GRPO가 행동 인식 리워드와 시퀀스 레벨 피드백으로 이를 해제.
2. 행동 교정
중복 예측 제거 실험:
- SFT: COCO +1.23%, LVIS +1.38%, VisDrone +15.3% 개선
- GRPO: COCO +0.08%, VisDrone +0.1% 개선
→ GRPO가 중복 예측을 효과적으로 억제
Large-box 예측 제거 실험 (Dense200):
- SFT: 20.5%가 large box, 제거 시 F1@mIoU 44.9→56.7
- GRPO: 3.5%만 large box, 제거 시 F1@mIoU 58.3→60.0
→ GRPO가 과도하게 큰 박스 예측 억제
3. 좌표 정밀도 개선?
제어 실험: 두 모델이 모두 GT 매칭에 성공한 경우만 비교
- COCO: SFT 63.0% → GRPO 63.5% (미미한 향상)
- LVIS: SFT 56.6% → GRPO 56.9% (미미한 향상)
→ GRPO의 주요 이점은 좌표 정밀도 향상이 아니라 행동 결함 교정
4. 올바른 예측의 가능성 향상
고온 샘플링 실험:
- SFT-Sampling-Best: 8회 전체 데이터셋 테스트 중 최고 F1
- SFT-Sampling-Vote: 각 샘플마다 8개 출력 중 최고 선택
결과:
- COCO: SFT-Sampling-Vote 72.6% > GRPO 72.0% (SFT가 잠재 능력 보유)
- LVIS/Dense200: SFT-Sampling은 GRPO에 미치지 못함
→ GRPO는 간단한 데이터셋에서는 샘플링 일관성 향상, 복잡한 태스크에서는 본질적으로 더 정확한 예측 가능
추론 효율성과 속도
토큰화 효율성:
- COCO: Rex-Omni 7.6 tokens/box vs SEED1.5-VL 148.8 tokens/box
- Dense200: Rex-Omni 5.1 tokens/box vs SEED1.5-VL 74.5 tokens/box
추론 속도 (A100 GPU, vLLM, BF16):
- 0-29 박스: < 2초
- 410-419 박스: > 16초
속도는 예측 객체 수에 선형 비례. 현재 MLLM 기반 검출기는 전통 최적화된 검출기보다 느리지만, 양자화나 증류로 개선 가능.
관련 연구
Regression-based Object Detection
CNN 기반 초기 모델(YOLO, SSD, Faster R-CNN)에서 앵커 프리 접근법(CornerNet, CenterNet, FCOS)을 거쳐 트랜스포머 기반 검출기(DETR, Deformable DETR, DINO)로 진화했습니다.
지속적 개선을 위한 혁신들:
- 아키텍처: FPN
- 손실 함수: Focal Loss
- 데이터 증강: MixUp, Mosaic
Open-set Object Detection
텍스트 프롬프트를 사용한 개방 어휘 검출:
- GLIP: 구문 grounding 데이터로 학습
- Grounding DINO: DINO와 GLIP 결합
- DINO-X: 확장된 개방 어휘 검출
MLLM-based Object Detection
직접 좌표 예측:
- Pix2Seq: 상대 좌표를 특수 토큰으로
- GPT4RoI: ROI 특징 사용
- Shikra, Ferret, Qwen2.5-VL: 다양한 좌표 표현
검색 기반:
- KOSMOS-2: 개체를 텍스트로 연결
- Osprey: 마스크 기반 제안
- VistaLLM: 영역 특징과 LLM 정렬
외부 디코더:
- LLaVA-Grounding: 바운딩 박스 생성 모듈
- VisionLLM: 다양한 비전 중심 작업
- PSALM: 세그멘테이션 기반 검출
결론
Rex-Omni는 MLLM 기반 객체 검출의 문제를 체계적으로 해결합니다.
핵심 기여:
- 효율적인 좌표 토큰화: 특수 토큰으로 학습 복잡도 감소 및 효율성 향상
- 대규모 데이터 생성: 맞춤형 엔진으로 2,200만 개 고품질 데이터 확보
- 2단계 학습 파이프라인: SFT + GRPO로 정확한 위치 파악과 깊은 언어 이해 달성
- 행동 교정: GRPO가 SFT 유도 결함(중복 예측, large-box 예측) 효과적으로 교정
실험 검증:
- 다양한 시각 인식 태스크에서 최고 또는 경쟁력 있는 제로샷 성능
- GRPO의 필수성 입증
한계와 향후 과제:
- 추론 속도: 모델 가속화 및 고급 리워드 기반 샘플링 필요
- MLLM의 행동 및 기하학적 한계 극복 가능성 입증
Rex-Omni는 다재다능하고 언어 인식 능력을 갖춘 차세대 인식 시스템으로 가는 중요한 단계입니다.